- English
- Esperanto
- icelandic
- беларускі
- O'zbek
- Hawaiian
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- český
- ελληνικά
- український
- Javanese
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Lietuvos
- Eesti Keel
- Română
- Srpski језик
- فارسی
- தமிழ்
- తెలుగు

Kokios yra įprastos 6A-10A ventiliatoriaus sukamojo jungiklio programos?
2024-10-04
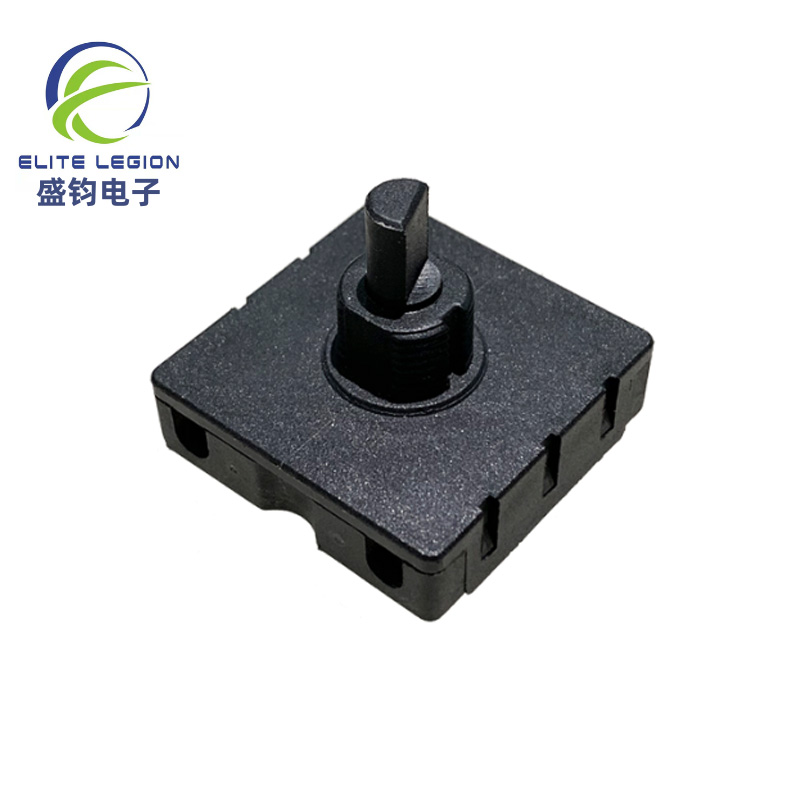
6a-10a ventiliatoriaus sukamasis jungiklisyra jungiklio rūšis, dažniausiai naudojama elektroninėje ir elektros pramonėje. Pagrindinė jo funkcija yra valdyti ventiliatoriaus ar kitokio tipo įrangos, kuriai reikalingas kintamas greičio valdymas, greitį. Kaip rodo pavadinimas, jungiklis gali valdyti maksimalią srovę 6A-10A. Jis gali būti naudojamas įvairiose programose, tokiose kaip oro kondicionieriai, šildytuvai ir ventiliacijos sistemos.
Kokios yra pagrindinės 6A-10A ventiliatoriaus sukamojo jungiklio savybės?
„6A-10A“ ventiliatoriaus „Rotary“ jungiklis turi kompaktišką dizainą, kuris leidžia lengvai įdiegti įvairiose elektros ir elektroninėse įrangose. Jis taip pat turi patvarią konstrukciją, kuri garantuoja ilgalaikius rezultatus. Jungiklis yra suprojektuotas su keliomis pozicijomis, leidžiančiomis tiksliai valdyti ventiliatoriaus ar įrangos greitį, todėl jis yra tinkamas programoms, kurioms reikalingas kintamas greičio valdymas.
Kokie yra „6A-10A“ ventiliatoriaus sukamojo jungiklio nauda?
Naudodamiesi „6A-10A“ ventiliatoriaus „Rotary“ jungikliu, galite pasiekti tikslų ventiliatorių ir kitų tipų įrangos greičio valdymą, pagerinti jų efektyvumą ir pratęsti jų gyvenimo trukmę. Jungiklį taip pat lengva naudoti ir įdiegti, jis pateikia patikimą valdymo sprendimą elektrinėms ir elektroninėms programoms.
Kaip pasirinkti tinkamą 6A-10A ventiliatoriaus „Rotary“ jungiklį savo programai?
Tinkamo 6A-10A ventiliatoriaus sukamojo jungiklio pasirinkimas jūsų programai priklauso nuo įvairių veiksnių, tokių kaip dabartinė apkrova, jungiklio padėties skaičius ir rankenėlės tipas. Turėtumėte atsižvelgti į jungiklio elektrines ir fizines specifikacijas ir įsitikinti, kad jis atitinka jūsų programos reikalavimus.
Kokie yra bendros 6A-10A ventiliatoriaus sukamojo jungiklio taikymo būdai?
6a-10a ventiliatoriaus sukamasis jungiklis dažniausiai naudojamas oro kondicionieriuose, šildytuvuose, ventiliacijos sistemose ir kitose įrangos tipuose, kuriems reikalingas kintamas greičio valdymas.
Kuo skiriasi 6A-10A ventiliatoriaus rotacinis jungiklis ir kitų tipų jungikliai?
„6A-10A“ ventiliatoriaus „Rotary“ jungiklis skiriasi nuo kitų tipų jungiklių, tokių kaip perjungimo jungiklis ir rokerio jungiklis, visų pirma todėl, kad jis skirtas valdyti ventiliatorių greitį ir kitos rūšies įrangą, kuriai reikalingas kintamas greičio valdymas. Kita vertus, perjungimo jungiklis ir rokerio jungiklis yra skirtas įjungti valdiklį.
Apibendrinant galima pasakyti, kad „6A-10A“ ventiliatoriaus rotacinis jungiklis yra esminis įvairių elektros ir elektroninės įrangos komponentas, kuriam reikalinga kintama greičio valdymas. Kompaktiškas jungiklio dizainas, patvari konstrukcija ir lengvai naudojamos savybės daro jį idealiu pasirinkimu oro kondicionieriams, šildytuvams, vėdinimo sistemoms ir kitoms įrangos rūšims. Norint pasirinkti tinkamą savo programos jungiklį, reikia atsižvelgti į įvairius veiksnius, tokius kaip dabartinė apkrova, jungiklio skaičiaus pozicijų skaičius ir rankenėlės tipas. Apskritai, „6A-10A“ ventiliatoriaus „Rotary“ jungiklis yra efektyvus ir patikimas valdymo sprendimas elektroninei ir elektros įrangai.
„Dongguan Sheng Jun Electronic Co., Ltd.“ yra pirmaujanti aukštos kokybės 6A-10A ventiliatoriaus sukamųjų jungiklių gamintojas ir tiekėjas. Turėdami ilgametę patirtį pramonėje, teikiame patikimus įvairių programų kontrolės sprendimus. Mes esame įsipareigoję klientams pasiūlyti geriausius produktus ir paslaugas. Norėdami gauti užklausų ir užsakymų, susisiekite su mumislegion@dglegion.com. Apsilankykite mūsų svetainėjehttps://www.legionswitch.comNorėdami gauti daugiau informacijos apie mūsų produktus ir paslaugas.
Mokslo tyrimų dokumentai:
1. L. Zhang, W. Cao, X. Zhou (2021). „Kintamo dažnio pavaros projektavimas ir modeliavimas, pagrįstas penkių lygių keitikliu“, IEEE prieiga, 9, 22636 - 22646.
2. T. Zhu, Y. Liu, Y. Li (2020). „10 kV ir 35 kV dujų izoliuotų skirstomųjų įrenginių pereinamojo įtampos perviršio tyrimas ypač aukštos įtampos kintamosios srovės perdavimo sistemose“, IOP konferencijų serija: Žemės ir aplinkos mokslas, 515, 022077.
3. Y. Jiang, S. Wu, J. Cao (2019). „Formos atminties lydinio pavara su anglies nanovamzdelių sustiprintu skersiniu susitraukimu mikrofluidiniam pritaikymui“, Micromachines, 10 (8), 502.
4. S. Sun, J. Xue, H. Zhang (2018). „Smartaus namų automatikos prototipų sistemos, paremtos daiktų internete, projektavimas“, 2018 m. Tarptautinė pažangių elektroninių medžiagų, kompiuterių ir medžiagų inžinerijos konferencija (AEMCME 2018), „Atlantis Press“, 1-5.
5. Y. Wang, S. Yu, Y. Liu (2017). „Aukšto dažnio LLC rezonansinio keitiklio galios nuostolių analizė esant šviesos apkrovai“, „Taikomojo mokslo ir„ Advanced Materials International “, 1 (2), 86–90.
6. G. Wang, H. Li, Y. Wu (2016). „Aukšto tikslumo mikrokopuliacinio jutiklio, pagrįsto bimorfo pjezoelektrinio unimorfo, atlikimo tyrimai“, 2016 m. IEEE tarptautinė konferencija dėl taikomo superlaidumo ir elektromagnetinių prietaisų (ASEMD), IEEE, 98–100.
7. H. Zhu, Y. Ma, X. Chen (2015). „Mikro jėgos jutiklio, skirto robotų rankų sugriebimo pajėgų matavimui, projektavimas“, Kinijos žemės ūkio mašinų draugijos sandoriai, 46 (6), 1-5.
8. Y. Li, X. Zhang, F. Zhang (2014). „Diskretinis laiko slenkimo režimo valdymas pneumatinėms raumenų pavaros sistemai“, Mechaninės sistemos ir signalo apdorojimas, 46 (2), 420-429.
9. Y. Qi, Y. Lin, Z. Gao (2013). „Naujas hibridinis algoritmas, skirtas daugiakriteriniams optimizavimui mikro-EDM“, „Journal of Materials Processing Technology“, 213 (9), 1545–1553.
10. X. Zhao, R. Pan, H. Liu (2012). „Mikro-nano gamybos technologijos, skirtos biologiniams lustai“, „Journal of Biomaterials and Nanobiotechnology“, 3 (1), 125–129.